Research Brief
From "Tool Tinkering" to a Unified Simulation Pipeline
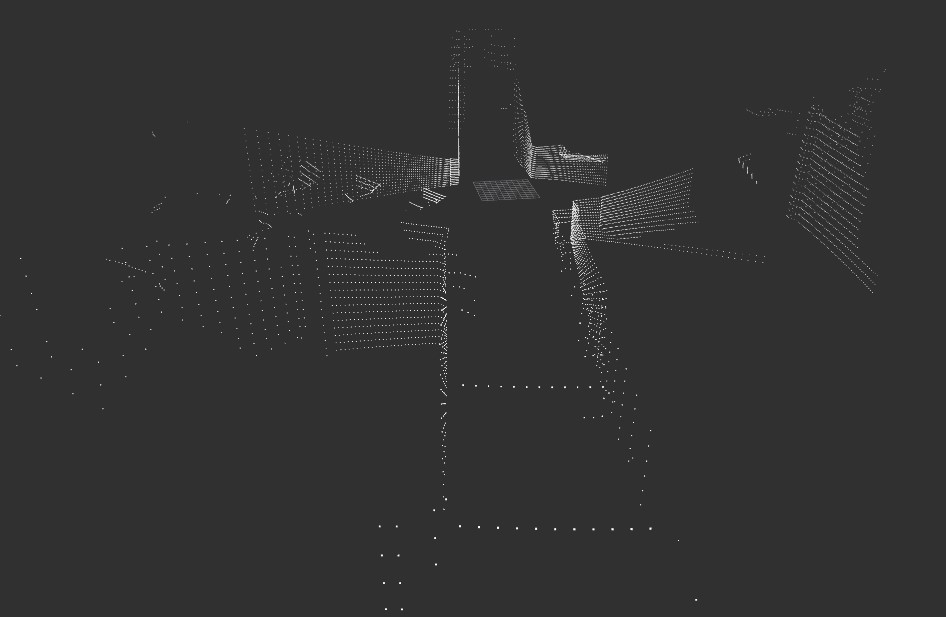
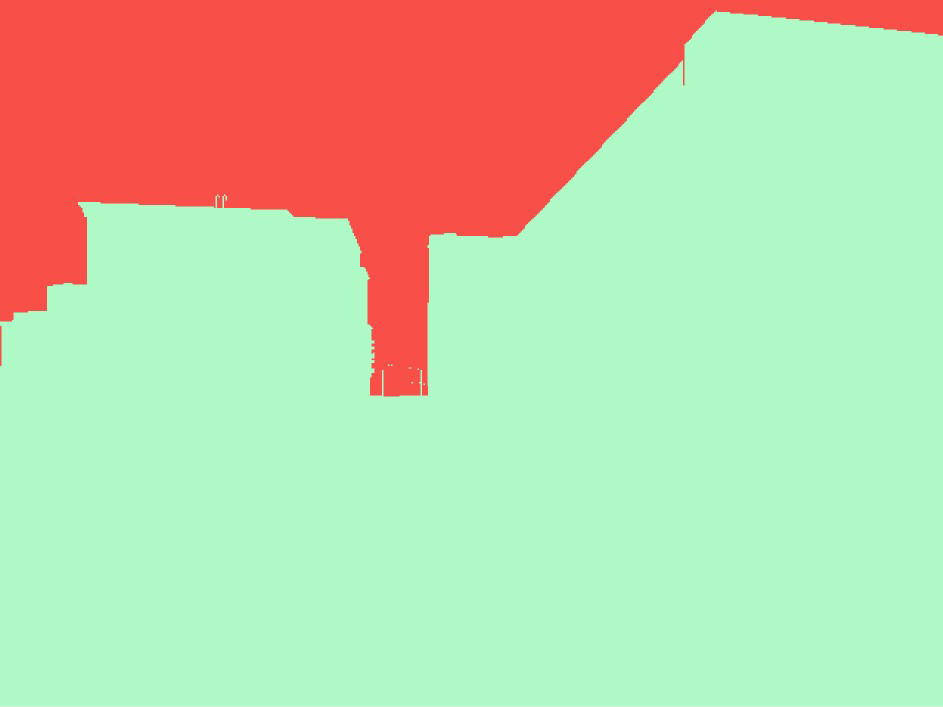
6G ISAC demands visual, LiDAR, IMU, GPS, and wireless data in one pipeline — but existing simulators each cover only half the problem.
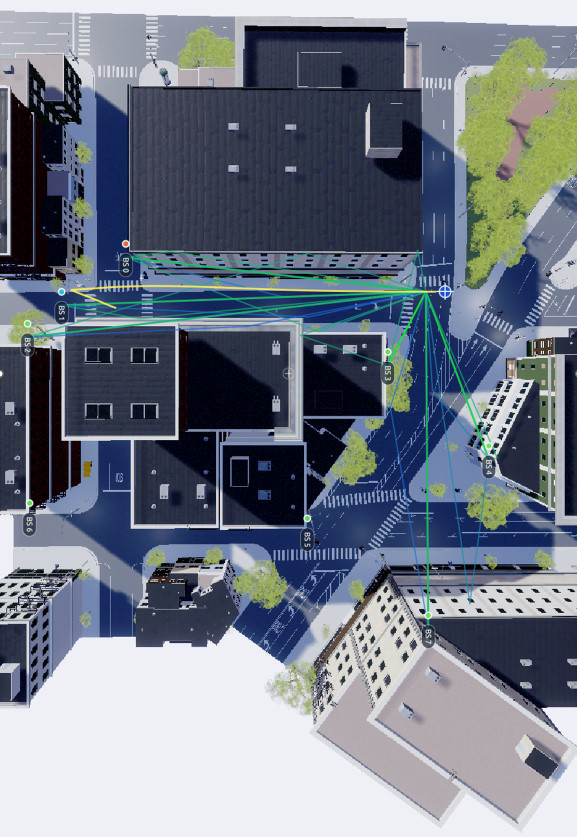
SimART bridges the gap with ROS: a shared clock and coordinate frame connect AirSim, Sionna RT/SYS, and CKM generation. A full session is recorded as one rosbag file.
Platform Contribution
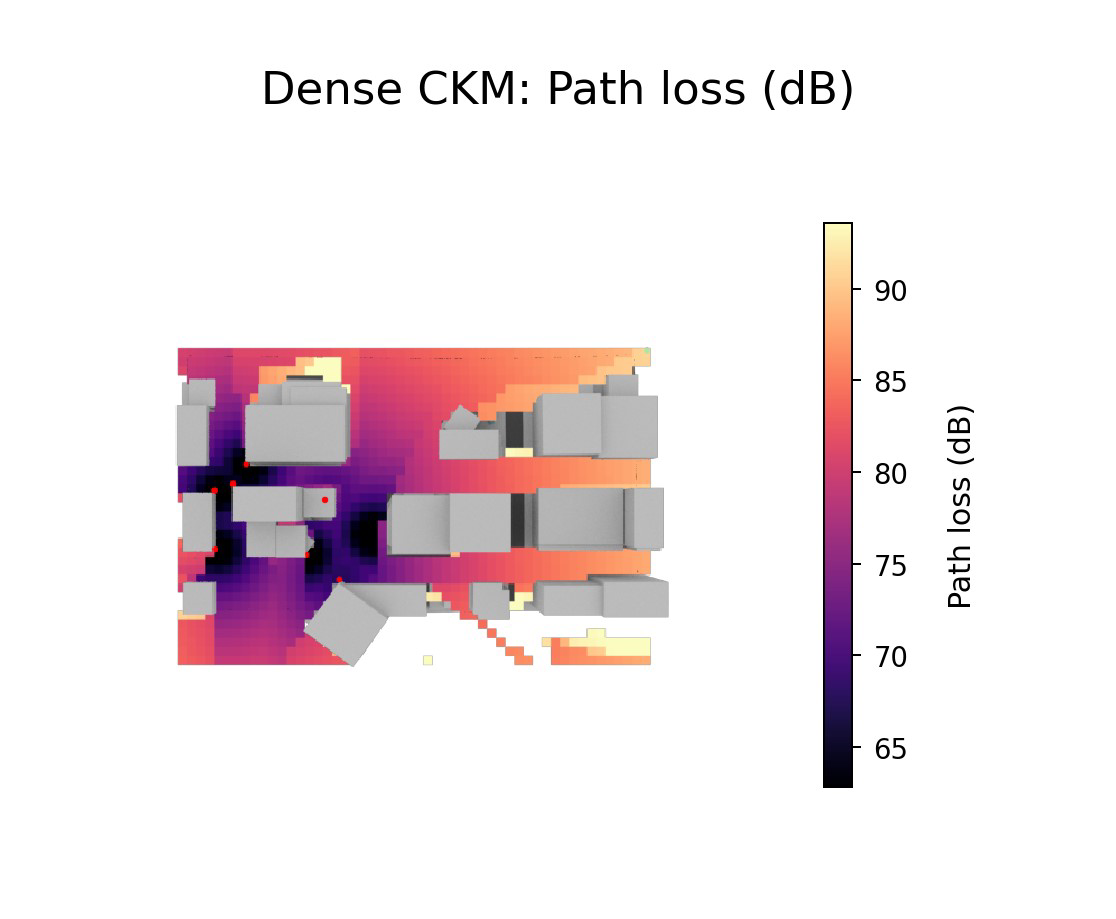
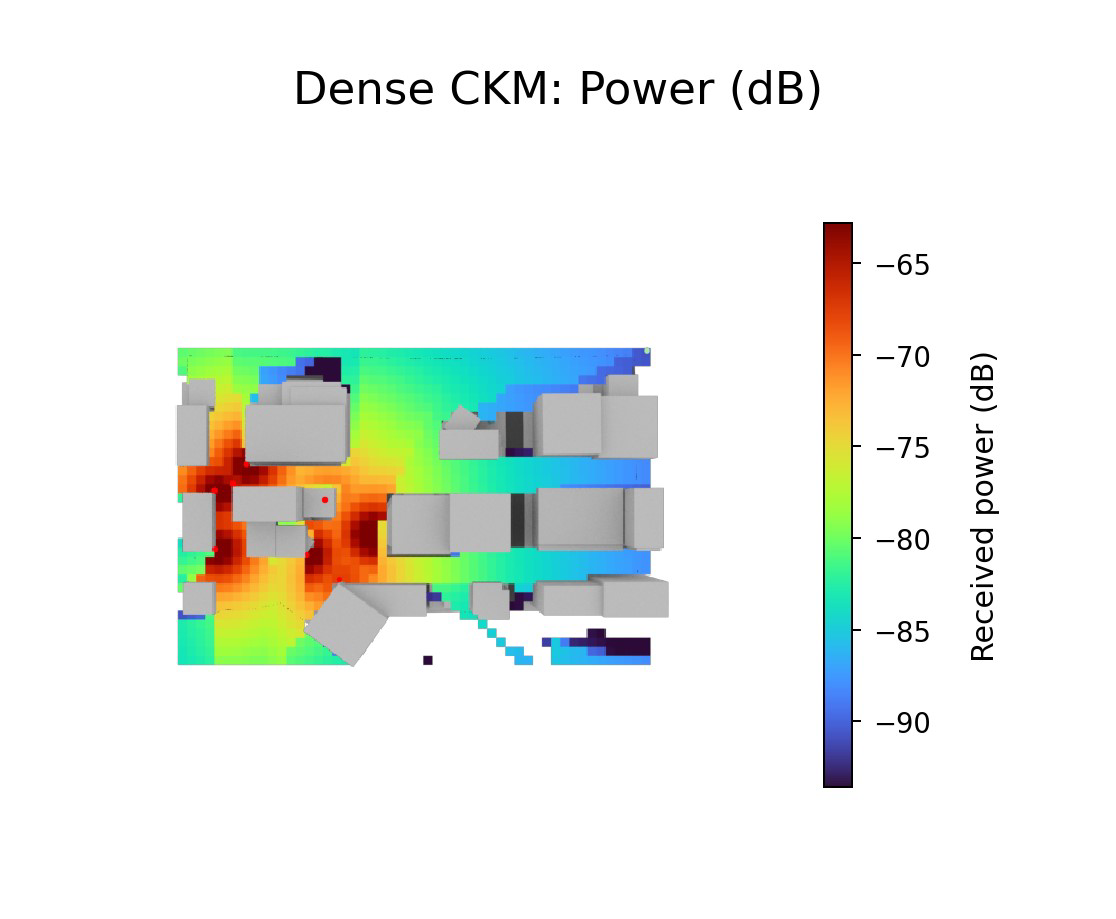
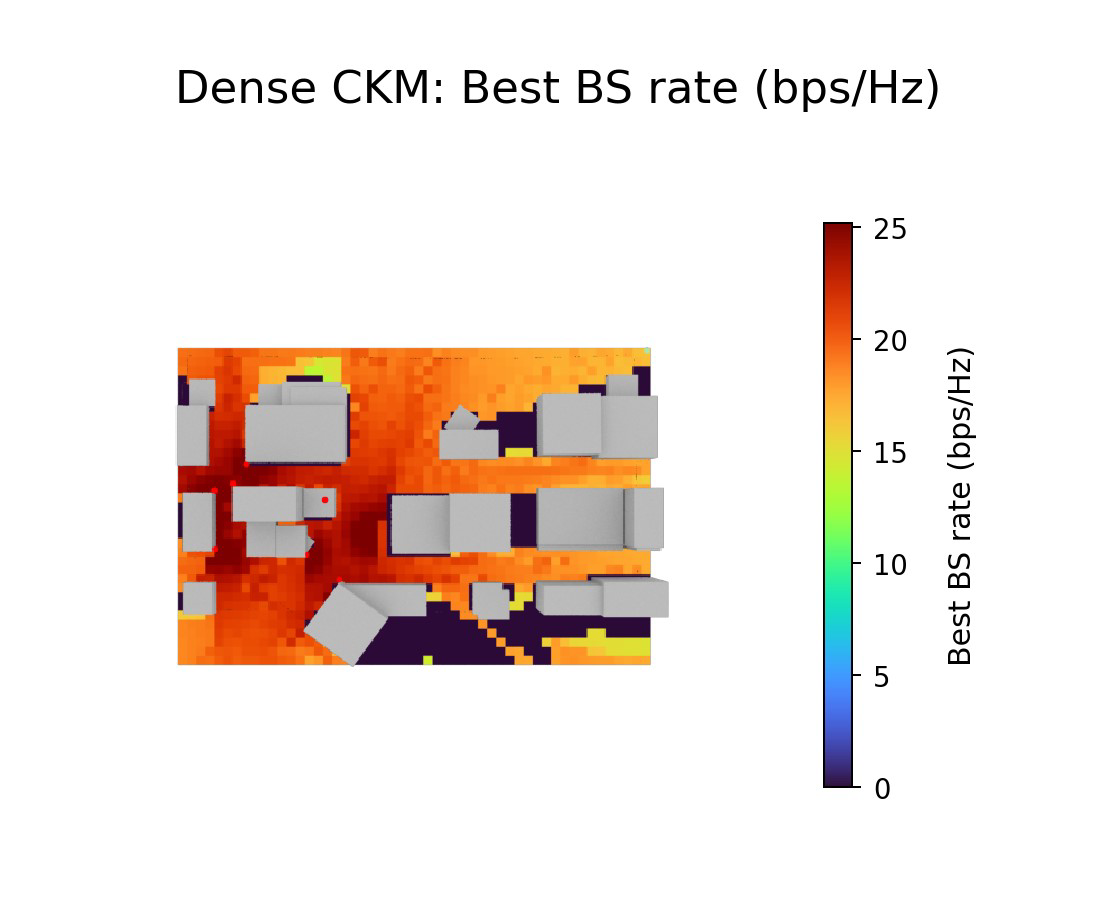
Connects physical sensing, ray tracing, PHY/MAC wireless evaluation, and CKM construction into a modular workflow.
Data Contribution
All sensor streams, channels, KPIs, and beam labels share a common clock and coordinate frame — ideal for multimodal learning.
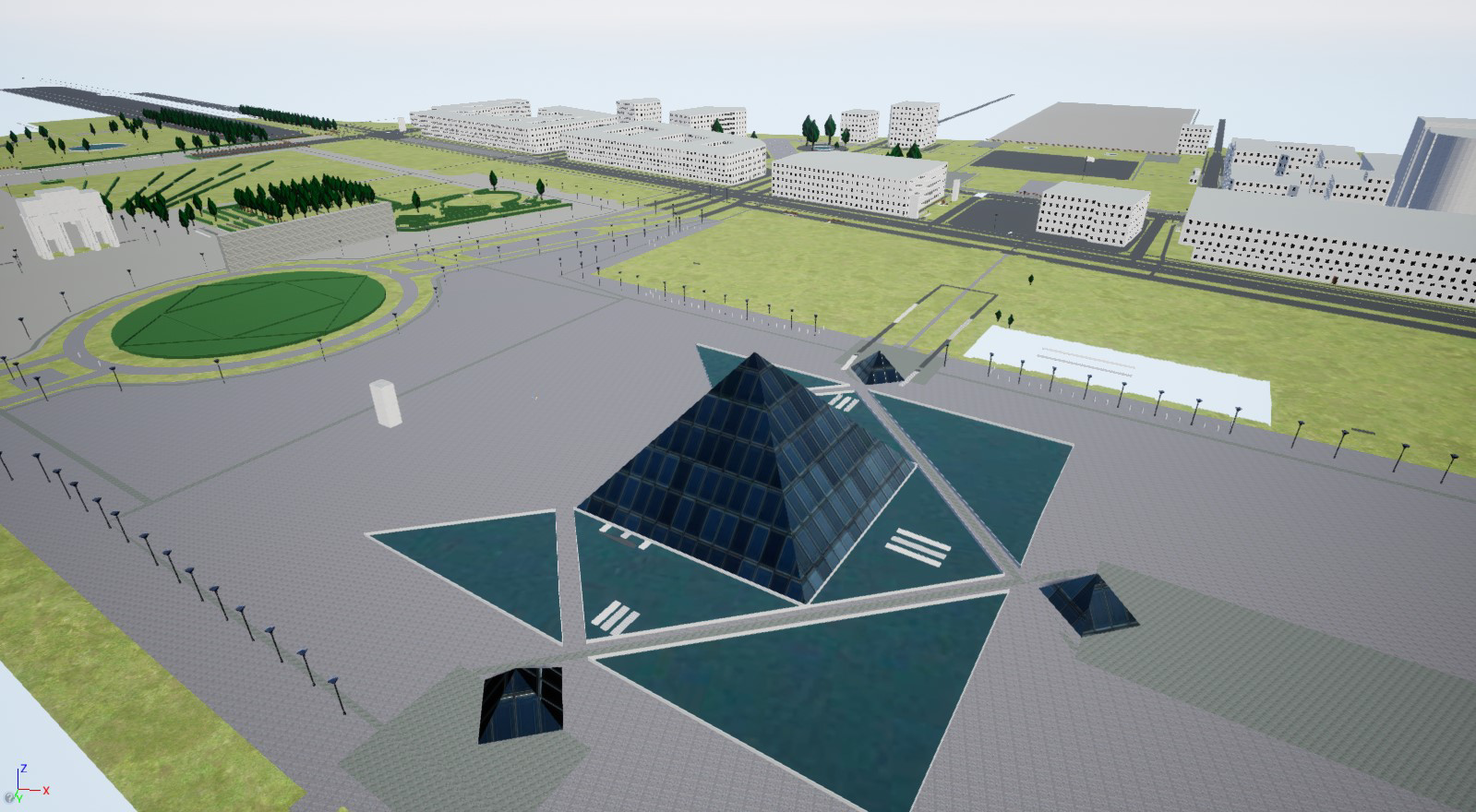
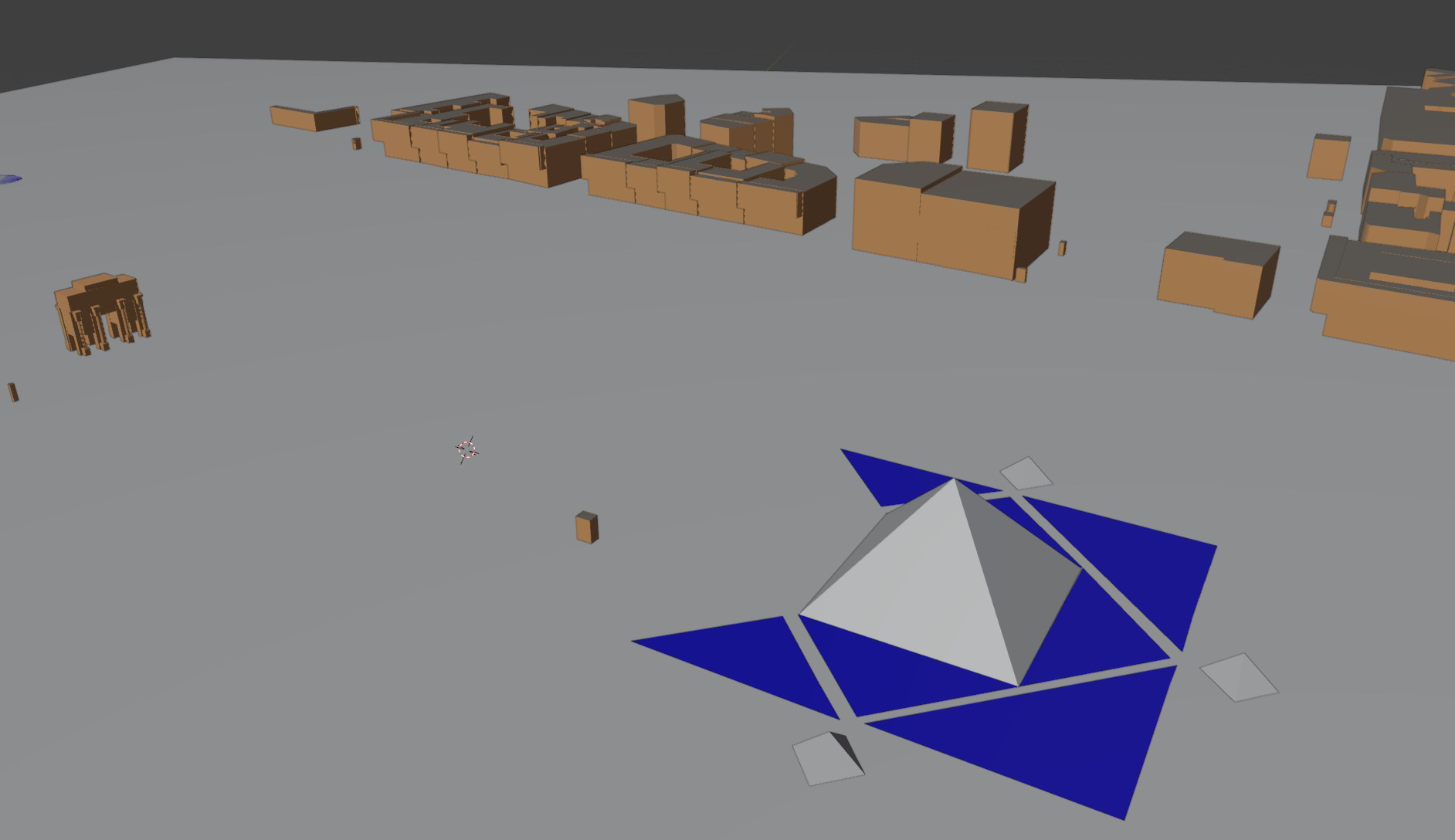
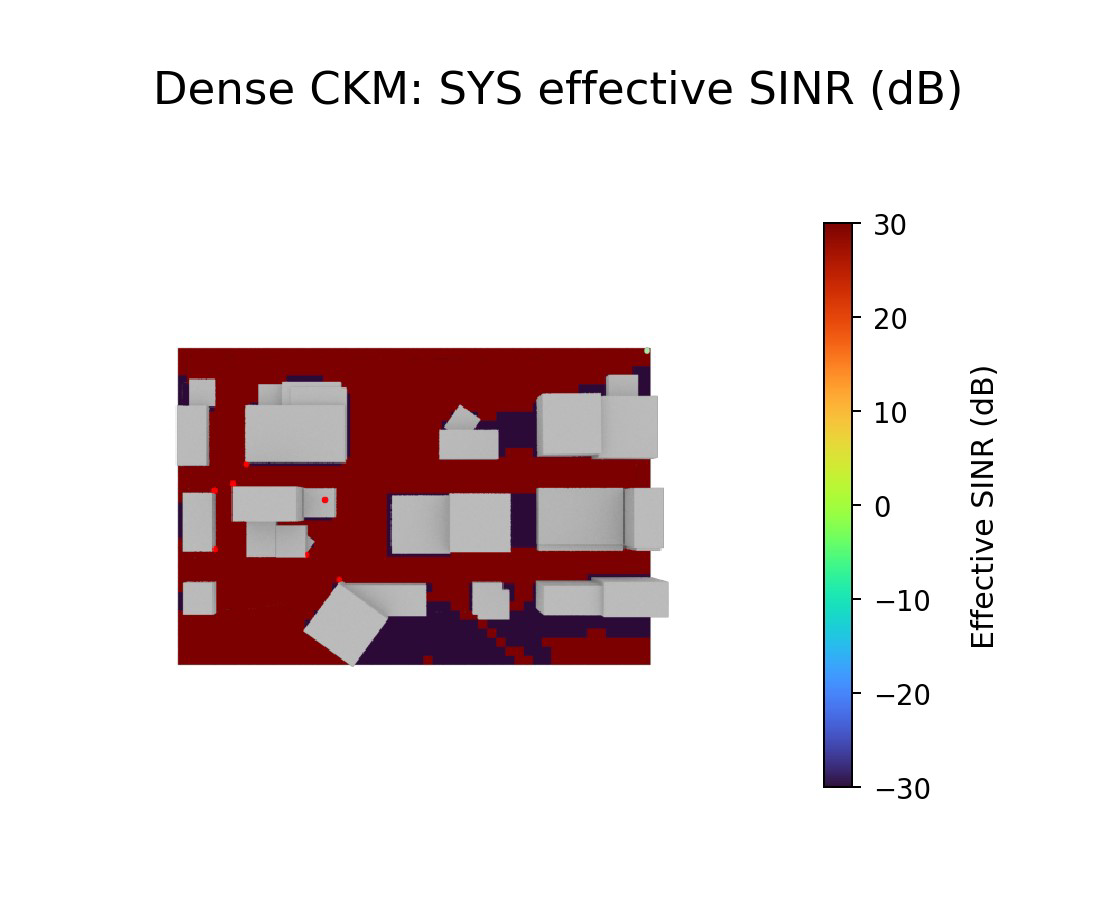
Scenario Contribution
Supports real OpenStreetMap maps and user-defined layouts, generating both visual and electromagnetic assets.